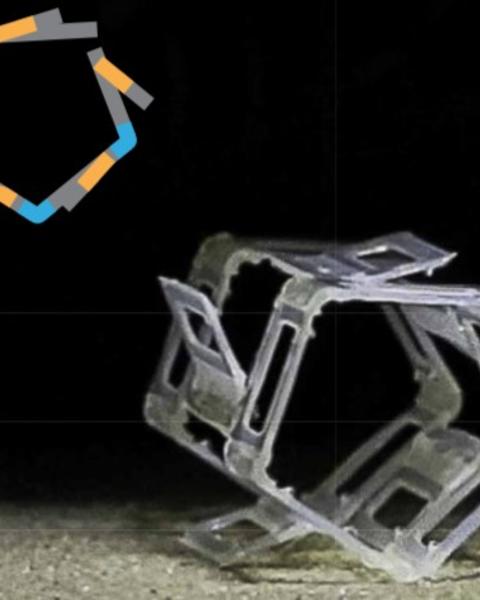
Untethered soft robotic matter with passive control of shape morphing and propulsion
Publication information:
Arda Kotikian, Connor McMahan, Emily Davidson, Jalilah Muhammad, Robert Weeks, Chiara Daraio, and Jennifer Lewis. 2019. “Untethered Soft Robotic Matter With Passive Control of Shape Morphing and Propulsion”. Science Robotics, 4, Pp. eaax7044. doi:10.1126/scirobotics.aax7044